سلام به همه، احتمالا بسیاری از آماتورهای رادیویی، مانند من، بیش از یک سرگرمی دارند، اما چندین. علاوه بر طراحی وسایل الکترونیکی، عکاسی، فیلمبرداری با دوربین DSLR و ویرایش فیلم را انجام می دهم. به عنوان یک فیلمبردار، برای فیلمبرداری به یک نوار لغزنده نیاز داشتم و ابتدا به طور خلاصه توضیح می دهم که چیست. عکس زیر نوار لغزنده کارخانه را نشان می دهد.
نوار لغزنده برای فیلمبرداری در دوربین ها و دوربین های فیلمبرداری طراحی شده است. این مشابه سیستم ریلی است که در سینمای با فرمت گسترده استفاده می شود. با کمک آن حرکت نرم دوربین در اطراف جسم مورد عکسبرداری ایجاد می شود. یکی دیگر از جلوه های بسیار قدرتمندی که می توان در هنگام کار با لغزنده استفاده کرد، امکان نزدیک شدن یا دورتر شدن از سوژه است. عکس بعدی موتوری را نشان می دهد که برای ساخت لغزنده انتخاب شده است.

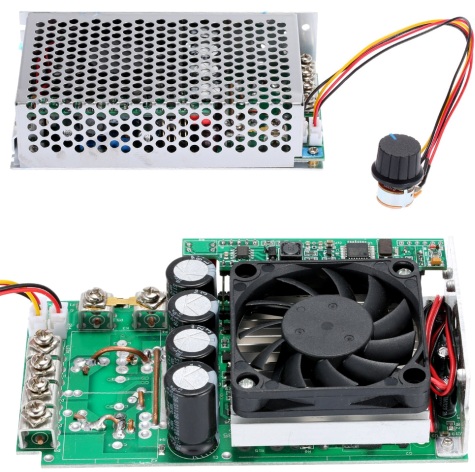
لغزنده توسط یک موتور 12 ولت DC هدایت می شود. نموداری از یک تنظیم کننده برای موتوری که کالسکه لغزنده را حرکت می دهد در اینترنت پیدا شد. عکس بعدی نشانگر روشن/خاموش روی LED، کلید ضامن که دنده عقب را کنترل می کند و کلید پاور را نشان می دهد.

هنگام کار با چنین دستگاهی، مهم است که کنترل سرعت صاف، به علاوه گنجاندن آسان عقب موتور وجود داشته باشد. سرعت چرخش شفت موتور، در صورت استفاده از رگلاتور ما، با چرخاندن دستگیره یک مقاومت متغیر 5 کیلو اهم به آرامی تنظیم می شود. شاید تنها من از کاربران این سایت نباشم که به عکاسی علاقه دارم و شخص دیگری بخواهد این دستگاه را تکرار کند؛ کسانی که مایلند می توانند آرشیو با نمودار مدار و برد مدار چاپی رگولاتور را در پایان دانلود کنند. از مقاله شکل زیر نمودار شماتیک یک رگولاتور برای یک موتور را نشان می دهد:
مدار رگولاتور

مدار بسیار ساده است و حتی توسط آماتورهای رادیویی تازه کار به راحتی قابل مونتاژ است. از مزیت های مونتاژ این دستگاه می توانم ارزان بودن و قابلیت سفارشی سازی آن را برای رفع نیاز شما نام ببرم. شکل برد مدار چاپی کنترلر را نشان می دهد:

اما دامنه کاربرد این رگولاتور تنها به لغزنده محدود نمی شود، به راحتی می توان از آن به عنوان تنظیم کننده سرعت استفاده کرد، مثلاً دریل ماشینی، درمل خانگی با برق 12 ولت و یا مثلاً یک کولر کامپیوتری با ابعاد. 80*80 یا 120*120 میلیمتر. من همچنین طرحی را برای معکوس کردن موتور یا به عبارت دیگر تغییر سریع چرخش شفت در جهت دیگر ایجاد کردم. برای این کار از یک سوئیچ ضامن شش پین با 2 موقعیت استفاده کردم. شکل زیر نمودار اتصال آن را نشان می دهد:

کنتاکت های میانی سوئیچ ضامن با علامت (+) و (-) به کنتاکت های روی برد با علامت M1.1 و M1.2 متصل می شوند، قطبیت مهم نیست. همه می دانند که خنک کننده های کامپیوتر، هنگامی که ولتاژ تغذیه و بر این اساس، سرعت کاهش می یابد، در حین کار صدای بسیار کمتری ایجاد می کنند. در عکس بعدی ترانزیستور KT805AM روی رادیاتور قرار دارد:

تقریباً هر ترانزیستور با ساختار n-p-n با توان متوسط و بالا را می توان در مدار استفاده کرد. دیود را می توان با آنالوگ های مناسب برای جریان جایگزین کرد، به عنوان مثال 1N4001، 1N4007 و دیگران. پایانه های موتور توسط یک دیود در اتصال معکوس شنت می شوند؛ این برای محافظت از ترانزیستور در لحظه های روشن و خاموش شدن مدار انجام شد، زیرا موتور ما دارای بار القایی است. همچنین، مدار نشان می دهد که نوار لغزنده بر روی یک LED متصل به صورت سری با یک مقاومت روشن شده است.

هنگام استفاده از موتوری با قدرت بیشتر از آنچه در عکس نشان داده شده است، ترانزیستور باید به رادیاتور متصل شود تا خنک کننده بهتر شود. عکسی از تخته به دست آمده در زیر نشان داده شده است:

در مورد مقاله کنترل سرعت موتور با معکوس بحث کنید
بین منبع تغذیه و بار وصل می شود. برق را می توان از باتری یا آداپتور AC/DC با بار مناسب تامین کرد.
بار می تواند هر موتور DC یا لامپ رشته ای باشد. به لطف عملکرد پالسی (PWM)، مدار تقریباً بدون اتلاف انرژی کار می کند. ترانزیستور کنترلی نیازی به هیت سینک ندارد.
مدار رگولاتور برای تنظیم سرعت مته برای تخته های مدار حفاری ایده آل است. در سرعت های پایین تضمین می کند که مته با گشتاور نسبتاً بالایی کار می کند.
توضیحات کنترل کننده سرعت موتور الکتریکی

عناصر منطقی DD1.1، DD1.2 در قالب یک ژنراتور PWM کلاسیک استفاده می شوند. مقاومت R1 فقط یک عملکرد محافظتی را انجام می دهد. فرکانس ژنراتور با ظرفیت C2 یا C3 و مقاومت پتانسیومتر PR1 همراه با R2، R3 تعیین می شود. عناصر منطقی متصل موازی DD1.3، DD1.4 ترانزیستور MOSFET (VT1) را کنترل می کنند.
هنگام استفاده از ترانزیستور ماسفت در مدار، به مقاومت R4 نیازی نیست و یک جامپر در جای آن نصب شده است. این مقاومت (R4) تنها در صورتی ارائه می شود که یک ترانزیستور دارلینگتون از ساختار n-p-n، به عنوان مثال، BD649، به جای ماسفت نصب شده باشد. سپس، برای محدود کردن جریان پایه، مقاومت R4 باید مقدار 1k...2.2k داشته باشد.
PR1 به شما این امکان را می دهد که چرخه وظیفه سیگنال تولید شده را در محدوده بسیار وسیعی از تقریباً 1% تا تقریباً 99% تغییر دهید. سیگنال ژنراتور به صورت دوره ای ترانزیستور VT1 را باز و بسته می کند و متوسط توان عرضه شده به بار (کانکتور Z2) به چرخه وظیفه سیگنال بستگی دارد. بنابراین، پتانسیومتر PR1 امکان تنظیم صاف توان تامین شده به بار را فراهم می کند.
دیود اتصال معکوس VD4 هنگام استفاده از بار القایی (به عنوان مثال، یک موتور الکتریکی) ضروری است. بدون دیود VD4، در لحظه خاموش شدن، ممکن است پالس هایی در تخلیه ترانزیستور VT1 ظاهر شود که به طور قابل توجهی از مقدار مجاز برای یک ترانزیستور معین فراتر می رود و این می تواند به آن آسیب برساند.
به لطف عملکرد پالس، تلفات برق در ترانزیستور VT1 اندک است و بنابراین نیازی به رادیاتور نیست، حتی در جریان های مرتبه چند آمپر، یعنی توان بار تا 100 وات. باید در نظر داشت که دستگاه یک تنظیم کننده قدرت است، نه تثبیت کننده دور موتور، بنابراین سرعت موتور به بار آن بستگی دارد.
توجه! مدار قدرت را در حالت ضربان تنظیم می کند و یک پیچ و خم را روی بار اعمال می کند. چنین پالس هایی می توانند منبع تداخل الکترومغناطیسی باشند. برای به حداقل رساندن تداخل، باید از اتصالات کوتاه بین واحد و بار استفاده شود.
سیم اتصال باید به شکل یک جفت پیچ خورده باشد (دو سیم معمولی که به هم تابیده شده اند). همچنین توصیه می شود که یک خازن الکترولیتی (مجموعه خازن ها) با ظرفیت 1000 ... 10000 میکرون را به کانکتور برق Z1 متصل کنید.

مدار یک خازن اضافی C3 را فراهم می کند که با استفاده از جامپر J1 متصل می شود. روشن کردن این خازن باعث می شود فرکانس ژنراتور از 700 هرتز به تقریبا 25 هرتز کاهش یابد. این از نظر تداخل الکترومغناطیسی ایجاد شده مفید است.
اگرچه در برخی موارد، کاهش فرکانس ممکن است غیرقابل قبول باشد، به عنوان مثال، ممکن است باعث شود لامپ به طور قابل توجهی سوسو بزند. سپس باید به طور مستقل ظرفیت بهینه C3 را انتخاب کنید.
را کنترل کننده دور موتور الکتریکی 220 ولتبه شما امکان می دهد فرکانس موتورهای الکتریکی را که برای کار از شبکه 220 ولت طراحی شده اند تغییر دهید.
یک کنترل کننده سرعت نسبتاً محبوب برای موتورهای الکتریکی 220 ولت AC یک مدار تریستور است. یک مدار معمولی اتصال یک موتور الکتریکی یا فن به مدار باز مدار آند تریستور است.
یکی از شرایط مهم هنگام استفاده از چنین تنظیم کننده ها، تماس قابل اعتماد در کل مدار است. این را نمی توان در مورد موتورهای الکتریکی کموتاتور گفت، زیرا مکانیسم برس آنها باعث ایجاد وقفه های کوتاه مدت در مدار الکتریکی می شود. این به طور قابل توجهی بر کیفیت تنظیم کننده تأثیر می گذارد.
شرح عملکرد مدار کنترل کننده سرعت
در زیر طرحتریستور کنترل کننده ی سرعت، به طور خاص برای تغییر سرعت چرخش کلکتور طراحی شده است موتورهای الکتریکی(مته برقی، فرز، پنکه). اولین چیزی که باید به آن توجه کرد این است که موتور به همراه تریستور قدرت VS2 به یکی از مورب های پل دیود VD3 متصل می شود در حالی که دیگری با ولتاژ برق تغذیه می شود. 220 ولت.
علاوه بر این، این تریستور توسط پالس های نسبتاً گسترده کنترل می شود، به همین دلیل خاموش شدن کوتاه مدت بار فعال، که مشخصه عملکرد موتور کموتاتور است، بر عملکرد پایدار این مدار تأثیر نمی گذارد.
برای کنترل تریستور VS1 در ترانزیستور VT1، یک ژنراتور پالس مونتاژ می شود. این ژنراتور توسط یک ولتاژ ذوزنقه ای که در نتیجه محدود کردن نیمه امواج مثبت توسط دیود زنر VD1 با فرکانس 100 هرتز ایجاد می شود، تغذیه می شود. خازن C1 از طریق مقاومت های R1، R2، R3 تخلیه می شود. مقاومت R1 میزان دشارژ این خازن را کنترل می کند.
هنگامی که خازن به ولتاژ کافی برای باز کردن ترانزیستور VT1 می رسد، یک پالس مثبت به ترمینال کنترل VS1 ارسال می شود. تریستور باز می شود و اکنون یک پالس کنترل طولانی در پین کنترل VS2 ظاهر می شود. و در حال حاضر از این تریستور، ولتاژی که در واقع روی سرعت تأثیر می گذارد، به موتور عرضه می شود.
سرعت چرخش موتور الکتریکی توسط مقاومت R1 کنترل می شود. از آنجایی که یک بار القایی به مدار VS2 متصل است، باز کردن خود به خود قفل تریستور حتی در غیاب سیگنال کنترل امکان پذیر است. بنابراین، برای جلوگیری از این اثر نامطلوب، یک دیود VD2 به مدار اضافه می شود که به موازات سیم پیچ تحریک L1 موتور الکتریکی متصل می شود.
قطعات فن و کنترل کننده سرعت موتور الکتریکی
دیود زنر - می تواند با دیود دیگری با ولتاژ تثبیت کننده در منطقه 27 - 36 ولت جایگزین شود. تریستور VS1 - هر کم مصرف با ولتاژ مستقیم بیش از 100 ولت، VS2 - امکان تامین KU201K، KU201L، KU202M وجود دارد. دیود VD2 - با ولتاژ معکوس حداقل 400 ولت و جریان رو به جلو بیش از 0.3 آمپر. خازن C1 – KM-6.
تنظیم کنترل کننده سرعت
هنگام تنظیم مدار تنظیم کننده، توصیه می شود از یک بارق استفاده کنید که به یک ولت متر اشاره گر برای جریان متناوب اجازه می دهد که به موازات موتور متصل می شود.
با چرخاندن دستگیره مقاومت R1، محدوده ولتاژ مشخص می شود. با انتخاب مقاومت R3 این محدوده در ناحیه 90 تا 220 ولت تنظیم می شود. اگر موتور فن در حداقل سرعت ناپایدار است، لازم است مقاومت R2 را کمی کاهش دهید.
مدار رگولاتور که برای تغییر سرعت چرخش موتور یا فن استفاده می شود، برای کار از شبکه جریان متناوب با ولتاژ 220 ولت طراحی شده است.
موتور، همراه با تریستور قدرت VS2، به مورب پل دیود VD3 متصل می شود، در حالی که دیگری ولتاژ برق AC 220 ولت دریافت می کند. علاوه بر این، این تریستور کنترل را با پالس های به اندازه کافی گسترده انجام می دهد، به همین دلیل قطع اتصال کوتاه، که با آن تمام موتورهای کموتاتور کار می کنند، بر عملکرد پایدار مدار تأثیر نمی گذارد.

اولین تریستور توسط ترانزیستور VT1 کنترل می شود که مطابق مدار ژنراتور پالس متصل است. به محض اینکه ولتاژ خازن برای باز کردن اولین ترانزیستور کافی شود، یک پالس مثبت به ترمینال کنترل تریستور ارسال می شود. تریستور باز می شود و اکنون یک پالس کنترل طولانی در تریستور دوم ظاهر می شود. و از آن ولتاژ که در واقع روی سرعت تأثیر می گذارد به موتور می رود.
سرعت چرخش موتور الکتریکی با مقاومت متغیر R1 تنظیم می شود. از آنجایی که یک بار القایی به مدار تریستور دوم متصل است، باز شدن خود به خود تریستور حتی در صورت عدم وجود سیگنال کنترل امکان پذیر است. بنابراین، برای جلوگیری از این، یک دیود VD2 در مدار قرار داده شده است که به موازات سیم پیچ L1 موتور متصل می شود.
هنگام تنظیم مدار کنترل کننده دور موتور، توصیه می شود از یکی استفاده کنید که می تواند برای اندازه گیری سرعت چرخش موتور الکتریکی استفاده شود، یا یک ولت متر اشاره گر معمولی برای جریان متناوب که به موازات موتور متصل می شود.
با انتخاب مقاومت R3، محدوده ولتاژ از 90 تا 220 ولت تنظیم می شود. اگر موتور در حداقل سرعت به درستی کار نکند، باید مقدار مقاومت R2 را کاهش داد.
این مدار برای تنظیم سرعت فن بسته به دما مناسب است.

به عنوان یک عنصر حساس استفاده می شود. در نتیجه گرمایش، مقاومت آن کاهش می یابد، و بنابراین، در خروجی تقویت کننده عملیاتی، برعکس، ولتاژ افزایش می یابد و سرعت فن را از طریق یک ترانزیستور اثر میدان کنترل می کند.
با مقاومت متغیر P1 می توانید کمترین سرعت چرخش فن را در کمترین دما تنظیم کنید و با مقاومت متغیر P2 می توانید بالاترین سرعت چرخش را در حداکثر دما کنترل کنید.
در شرایط عادی، مقاومت P1 را روی حداقل دور موتور تنظیم می کنیم. سپس سنسور گرم می شود و سرعت فن مورد نظر با مقاومت P2 تنظیم می شود.
مدار سرعت فن را بسته به خوانش دما با استفاده از ضریب دمای منفی معمولی کنترل می کند.

مدار آنقدر ساده است که فقط شامل سه جزء رادیویی است: یک تنظیم کننده ولتاژ قابل تنظیم LM317Tو دو مقاومت تشکیل دهنده یک تقسیم کننده ولتاژ. یکی از مقاومت ها ترمیستور TCR منفی و دیگری یک مقاومت معمولی است. برای سادهتر کردن مونتاژ، نقشهای از برد مدار چاپی را در زیر ارائه میدهم.

به منظور صرفه جویی در هزینه، می توانید یک چرخ زاویه ای استاندارد را به یک کنترل کننده سرعت مجهز کنید. چنین تنظیم کننده ای برای سنگ زنی محفظه تجهیزات الکترونیکی مختلف یک ابزار ضروری در زرادخانه یک آماتور رادیویی است.
ریز مدار U2008B یک کنترل کننده سرعت PWM برای موتورهای کموتاتور AC است. تولید شده توسط TELEFUNKEN، اغلب در مدار کنترل مته الکتریکی، اره پله، اره منبت کاری اره مویی و غیره دیده می شود و همچنین با موتورهای جاروبرقی کار می کند و به شما امکان می دهد کشش را تنظیم کنید. مدار استارت نرم داخلی به طور قابل توجهی عمر موتورها را افزایش می دهد. از مدارهای کنترلی مبتنی بر این تراشه نیز می توان برای تنظیم قدرت، به عنوان مثال، بخاری ها استفاده کرد.
همه مته های مدرن با تنظیم کننده های سرعت موتور ساخته شده اند ، اما مطمئناً در زرادخانه هر آماتور رادیویی یک مته قدیمی شوروی وجود دارد که در آن تغییر سرعت در نظر گرفته نشده بود ، که به شدت ویژگی های عملکرد را کاهش می دهد.
شما می توانید سرعت چرخش یک موتور بدون جاروبک ناهمزمان را با تنظیم فرکانس ولتاژ منبع تغذیه AC تنظیم کنید. این طرح به شما امکان می دهد سرعت چرخش را در محدوده نسبتاً گسترده ای تنظیم کنید - از 1000 تا 4000 دور در دقیقه.
موتورهای کموتاتور اغلب در وسایل برقی خانگی و ابزار برقی یافت می شوند: ماشین لباسشویی، آسیاب، مته، جاروبرقی، و غیره. گشتاور ) - همان چیزی است که برای اکثر ابزارهای برقی به آن نیاز دارید.
در این مورد، موتورهای کموتاتور می توانند هم با جریان مستقیم (به ویژه جریان اصلاح شده) و هم با جریان متناوب از یک شبکه خانگی تغذیه شوند. برای کنترل سرعت روتور موتور کموتاتور از کنترل کننده های سرعت استفاده می شود که در این مقاله به آنها پرداخته خواهد شد.
ابتدا بیایید طراحی و اصل عملکرد یک موتور کموتاتور را به یاد بیاوریم. موتور کموتاتور لزوماً شامل بخش های زیر است: روتور، استاتور و واحد سوئیچینگ برس-کلکتور. هنگامی که برق به استاتور و روتور اعمال می شود، میدان های مغناطیسی آنها شروع به تعامل کرده و روتور در نهایت شروع به چرخش می کند.
برق از طریق برس های گرافیتی که محکم به کموتاتور (به لایه های کموتاتور) می خورند، به روتور می رسد. برای تغییر جهت چرخش روتور، تغییر فازبندی ولتاژ روی استاتور یا روتور ضروری است.

سیم پیچ های روتور و استاتور می توانند از منابع مختلف تغذیه شوند یا به صورت موازی یا سری به یکدیگر متصل شوند. این است که چگونه موتورهای کموتاتور تحریک موازی و سری متفاوت هستند. این موتورهای کموتاتور سری برانگیخته است که در اکثر وسایل برقی خانگی یافت می شود، زیرا چنین گنجاندنی امکان به دست آوردن موتوری مقاوم در برابر بار اضافی را فراهم می کند.
در مورد کنترل کننده های سرعت صحبت می کنیم، اول از همه ما بر روی ساده ترین مدار تریستور (تریاک) تمرکز می کنیم (پایین را ببینید). این محلول در جاروبرقی ها، ماشین های لباسشویی، آسیاب ها استفاده می شود و هنگام کار در مدارهای جریان متناوب (به ویژه از شبکه خانگی) قابلیت اطمینان بالایی را نشان می دهد.
این مدار کاملاً ساده کار می کند: در هر دوره ولتاژ اصلی، از طریق یک مقاومت به ولتاژ باز کردن قفل دینیستور متصل به الکترود کنترل کلید اصلی (تریاک) شارژ می شود، پس از آن باز می شود و جریان را به بار منتقل می کند. (به موتور کموتاتور).


با تنظیم زمان شارژ خازن در مدار کنترل بازشو تریاک، متوسط توان عرضه شده به موتور تنظیم شده و سرعت نیز بر این اساس تنظیم می شود. این ساده ترین تنظیم کننده بدون بازخورد فعلی است.
مدار تریاک شبیه مدار معمولی است؛ هیچ بازخوردی در آن وجود ندارد. برای ارائه بازخورد فعلی، به عنوان مثال برای حفظ توان قابل قبول و جلوگیری از اضافه بار، تجهیزات الکترونیکی اضافی مورد نیاز است. اما اگر گزینه های مدارهای ساده و سرراست را در نظر بگیریم، مدار تریاک با یک مدار رئوستاتیک دنبال می شود.
مدار رئوستات به شما امکان می دهد سرعت را به طور موثر تنظیم کنید، اما منجر به اتلاف مقدار زیادی گرما می شود. این به یک رادیاتور و حذف گرمای موثر نیاز دارد که به معنای اتلاف انرژی و در نتیجه راندمان پایین است.

مدارهای رگولاتور مبتنی بر مدارهای کنترل تریستور ویژه یا حداقل بر روی یک تایمر یکپارچه موثرتر هستند. تغییر بار (موتور کموتاتور) روی جریان متناوب توسط یک ترانزیستور قدرت (یا تریستور) انجام می شود که در هر دوره سینوسی شبکه یک یا چند بار باز و بسته می شود. این امر میانگین توان عرضه شده به موتور را تنظیم می کند.
مدار کنترل توسط 12 ولت DC از منبع خود یا از یک شبکه 220 ولت از طریق یک مدار خاموش کننده تغذیه می شود. چنین مدارهایی برای کنترل موتورهای قدرتمند مناسب هستند.
البته اصل تنظیم با ریز مدارهای DC است. برای مثال، یک ترانزیستور با فرکانس مشخصی چند کیلوهرتز باز می شود، اما مدت زمان حالت باز تنظیم می شود. بنابراین با چرخاندن دسته مقاومت متغیر، سرعت چرخش روتور موتور کموتاتور تنظیم می شود. این روش برای حفظ سرعت کم موتور کموتاتور تحت بار مناسب است.
کنترل بهتر، تنظیم جریان مستقیم است. هنگامی که PWM در فرکانس حدود 15 کیلوهرتز کار می کند، تنظیم عرض پالس ولتاژ را در جریان تقریباً یکسان کنترل می کند. فرض کنید با تنظیم ولتاژ ثابت در محدوده 10 تا 30 ولت، سرعت های متفاوتی را در جریانی حدود 80 آمپر می گیرند و به میانگین توان مورد نیاز دست می یابند.
اگر می خواهید یک رگولاتور ساده برای یک موتور کموتاتور با دستان خود بدون درخواست خاصی برای بازخورد بسازید، می توانید مدار تریستور را انتخاب کنید. تنها چیزی که نیاز دارید یک آهن لحیم کاری، یک خازن، یک دینیستور، یک تریستور، یک جفت مقاومت و سیم است.
اگر به رگولاتور با کیفیت بالاتر با قابلیت حفظ سرعت پایدار در بارهای دینامیکی نیاز دارید، نگاهی دقیقتر به تنظیمکنندههای روی ریزمدارها با بازخوردی بیندازید که میتواند سیگنال تاکوژنراتور (حسگر سرعت) یک موتور کموتاتور را پردازش کند. به عنوان مثال، در ماشین لباسشویی.
آندری پوونی