Impulss metallidetektorid oma nime saanud oma tööpõhimõtte järgi: esmalt annab välja signaaliimpulsi, siis vaikib ja saab samal mähisel olevalt metallist sihtmärgilt signaali, siis annab uuesti impulsi jne.
Impulssmetallidetektoreid nimetatakse ka analoogiks. Selle põhjuseks on asjaolu, et nad ei töötle midagi, neil pole signaali töötlemiseks sisseehitatud programme, vaid saadavad signaali sihtmärgist kõlarisse kohe operaatorile.
Neil pole protsessorit, erinevalt paljudest kaasaegsetest ekraaniga metallidetektoritest, mis kuvavad ekraanil VDI numbri.
Kuid mitte iga analoogmetallidetektor pole impulssdetektor. Seade võib töötada muude tehnoloogiatega ja olla analoog. Allpool on kuva analoog metallidetektorite tüüpilisest esindajast - Golden Mask 4WD PRO.
Impulss- (analoog) metallidetektorite eelised ja puudused.
Eelised:
- kiire reageerimine sihtmärgilt
- suur otsingusügavus
- tõhus töö rasketel muldadel
- töötab hästi kõrge mineralisatsiooniga muldadel
- töötab hästi soolastel muldadel
- neil on raske töötada tingimustes, kus on palju metallesemeid
- väga vastuvõtlik elektromagnetilistele häiretele
Nii suurendavad digitaalsed metallidetektorid otsingusügavust ja võivad töötada rasketel pinnastel.
Ja analoogsed miinidetektorid hakkavad töötama suure hulga metalliprahi tingimustes.
Kuid üldiselt jäävad meie väited analoogmetallidetektorite eeliste ja puuduste kohta tõeks.
On õiglane arvamus, et impulss-metallidetektorid on head vanades asulates, maapiirkondades, randades, kuid mitte linnakeskkonnas.
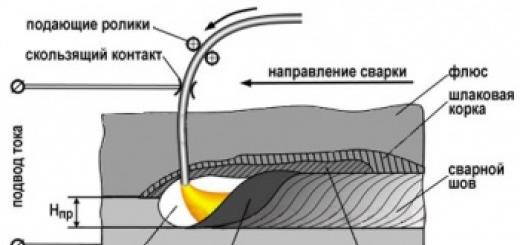
Impulssmetallidetektori tööpõhimõte
Impulss metallidetektor on ühe traadi mähisega rull. See mähis nii võtab vastu kui ka väljastab signaali.Esiteks väljastab metallidetektor signaali, seejärel vaikib ja võtab sihtmärgilt indutseeritud signaali vastu. (Nagu te ilmselt teate, indutseerib elektromagnetiline impulss metallesemes elektromagnetilise signaali ja kui elektromagnetväli juhis liigub, elektrit ja vastupidine impulss).
Selliseid metallidetektoreid nimetatakse ka PI-detektoriteks.
Klassikaline näide sellisest seadmest on Golden Maski impulss-sügavmetallidetektor Deep Hunter PRO-3.
Kuid pöördume tagasi artikli teema juurde - "Impulssmetallidetektorid - tööpõhimõte".
Sihtmärgilt vastuvõetud signaalil on vaibumiskiirus võrreldes algse signaaliga muutunud. Selle põhjal järeldatakse, et mähise all on sihtmärk.
Allolev diagramm näitab seda pilti punktis - 10 (sihtmärk asub seal). Lagunemiskiiruse muutus on nähtav.

Sihtmärgilt vastuvõetud signaal suureneb, kui mähis sellele läheneb. Seega, kui sihtmärk asub sügaval, kuuleb nõrk signaal.
(Digiseadmete puhul peab signaali tugevus ületama teatud läve, mille järel annab protsessor käsu sihtsignaali helindamiseks).
Analoogmetallidetektorid võivad olla ainult lineaarse diskrimineerimisega, st. Saate eesmärgisegmente järjest sulgeda või avada. (Professionaalsetes digitaalsetes saab seda teha suvalises järjekorras. Selle eest vastutab protsessor)
Sellest tulenevalt ilmneb sama probleem heliseadetega. Pulssinstrumentides saate heli kõrgust muuta. Kuid seal ei ole rohkem kui 2 heli: must, värviline. Nende tonaalsus on erinev (seda reguleerite ise), kuid polüfoonia ei tule kõne allagi. Kuid protsessorisüsteemides juhtub seda sageli ja protsessor teeb seda.
Analoogseadmetel pole kuvarit, vaid reguleerimiseks on ainult nupud ja lülitid. (ei ole protsessorit, mis midagi töötleks ja ekraanile edastaks)
Pulserid võivad olla ühe- või mitmesageduslikud, kuid igal juhul peate uuele sagedusele lülitumiseks klõpsama lülitit.
Mida madalam on nende seadmete sagedus, seda sügavamalt nad sihtmärki näevad. Nõrgalt juhtivatel eesmärkidel on vajalik kõrge sagedus. (Tegelikult on digiseadmetes sama sõltuvus).
Tavaliselt töötavad impulssmetallidetektorid sagedustel alla 30 kHz.
Tere kõigile! Pole ammu siia kirjutanud. Teha oli palju... Väljas on juba kevad, teist päeva püsib temperatuur 9-10 kraadi juures. Lumi sulab vaikselt. Hooaja avamine on ukse ees. Seega üks asi, mis aitaks aega mööda saata ja hooaega lähemale tuua, oleks oma kätega nullist metallidetektori kokku panemine. Jäin tulemusega rahule :)
Kes ei jõua ära oodata, siis siin on video sellest imest tegevuses:
Kõik sai alguse sellest, et lõpuks soetasin fooliumplaadi, maksmata selle eest sentigi)). Selle PCB testimise esimene samm oli metallidetektori kokkupanek.
Kokkupanemiseks valiti impulssmetallidetektori ahel “Pirate”, sest polnud tahtmist biitidega seadet teha). Seega on vooluahel alla laaditud, programm Sprint Layot installitud ja trükkplaat fotopaberile prinditud. Hakkan kokku panema.
Plaat valmistati laserraua meetodil (lühendatult LUT). Ma ei hakka detailidesse laskuma, selleks on Google :). See on kõik, PCB lõigatakse välja, rajad kantakse plaadile.

Järgmisena lahjendan söövituslahust. Ja siis aitas mind jälle akust elektrolüüt! Lahus sisaldas lauasoola, vesinikperoksiidi ja elektrolüüti (sama päeva õhtul lõi kassipoeg lahusega purgi ümber).
Noh, tahvel on söövitatud ja augud puuritud. Nüüd tuleb teda tinatada. Tinamine toimus jootekolbiga.
Kätte on jõudnud pikim montaažietapp. Nimelt detailide kogumine, otsimine ja jootmine. Nii mikroskeemid kui ka kaks transistorit leiti ilma raskusteta. Vanadest tahvlitest tõmmati kondensaatorid ja takistid. Aga mul polnud mitut takistit. Nende järele tuli minna teletöökotta. Nad andsid need mulle TASUTA.
Plaat on kokku pandud, katsepool keritud. Kaasamise hetk on saabunud. Esimene toide tehti 12-voldist toiteallikast. Keerasin juhtmeid, ühendasin pooli, kontrollisin polaarsust, lülitasin sisse... ei töötanud... oli vaikne (. Transistor kuumenes. Jootsin uuesti. Lülitasin sisse jällegi... Hilisemad kontrollid tuvastasid K157UD2 skeemi rikke rõõmust :)

Järgmisel päeval loodi skeem ja sai kultuurihoone. Ühendused on eemaldatud. Nüüd oli vaja tavalist mähist. Lõikasin selle vineeritükist välja. Seejärel valisin keerdude arvu, täitsin mähise kuuma liimiga ja mässisin kinni sinine elektriline lint.





Nüüd oli vaja materjali ridva jaoks, millele järgmine päev pühendati. Ostsin 4 meetrit veevärki PVC torud ja 0,5 meetrit kanalisatsioonitoru. Nendest lõigati välja vastavad osad varda kokkupanemiseks. Torud joodeti kuuma liimi ja fööniga. 


Varras on kokku pandud, mähis valmis, seadme korpus on omandanud korraliku välimuse. Jääb üle vaid kõik kombineerida. Plokk kinnitatakse varda külge liitmike abil. Aga poes polnud plastpolti, millega rulli kinnitada. Mähis hoitakse ajutiselt lipsu küljes.


Jääb üle vaid aku koos laadijaga osta. See töötab ka kruvikeeraja akuga :).
Kodus hakkab seade niklile reageerima alates 20 cm kauguselt, mis pole minu arvates halb. Ütlen ka, et see ei diskrimineeri, seega on võimatu maha lõigata prügimetalli, mida kõik kaevajad nii vihkavad.
Jäin monteerimisprotsessist ja saadud tulemustest täieliku rahulolu ning arvan, et täiendasin veidi oma amatöörraadiooskusi, rakendades praktikas uusi meetodeid.
Niisiis, minu investeering (va aku ostmine) maksis 230 rubla. Akuga arvan, et see on umbes 1000 rubla. Selle seadme abil saab vanarauda otsides hõlpsasti tagasi maksta ja isegi teenida. Müntide otsimine on samuti võimalik, kuid diskrimineerimise puudumise tõttu on see keeruline.
Ma räägin teile fotodest. Tegin need endale, nii et nende kvaliteet jääb pisut hõredaks :)
annan teile ka nõu tellige kanal "Vana Vjatka", kust leiate palju videoid kaevamise, metallidetektorite, navigatsiooni, kartograafia ja mündihoolduse kohta:
Modelleerija-konstruktor 1998 nr 7
Minu disainitud metallidetektor ei ole veel kasutatud ei rahuvalveoperatsioonidel miiniväljade tuvastamiseks ja puhastamiseks ega suuremahulistes geoloogilistes või arheoloogilistes uuringutes. Mõeldud mitte professionaalidele, vaid amatööridele, kelle soovi "maa alla vaadata" saab rahuldada tabelis toodud parameetritega disain, on see "beat metallidetektori" täiustatud versioon.
Tundlikkus seade suureneb tänu sondeerimisimpulsi kestuse sõltuvuse kasulikule kasutamisele (selgele fikseerimisele) sõnumite endi intensiivsusest automaatse sagedusjuhtimise (AFC) kasutuselevõtuga otsingugeneraatorisse. Lisaks ei olnud elektroonikaseadmete pinge ja temperatuuri kompenseerimise stabiliseerimiseks vaja täiendavaid meetmeid.
Ja skeptikute ennustatud "leppimatud vastuolud" (nad ütlevad, et otsingu võnkeahela sageduse muutus metalli sisenemisel tööala AFC-süsteemi normaalse toimimisega kokkusobimatu) oli praktika enda poolt lubatud. Selgus, et kui andur liigub üle uuritava pinna kiirusega 0,5-1 m/s, ei lähe seadme ahel sugugi vastuollu automaatse sageduse juhtimisega, millel on märkimisväärne inerts (suur ajakonstant).
Juba plokkskeemi analüüsist on selge, et sellise seadme valmistamine on ilmselgelt keerulisem kui ühegi varasema vähem tundliku analoogi, sealhulgas "Modelisti-konstruktori" nr 8"85 ja 4"96 väljaandes avaldatud metallidetektorite puhul. ajakiri. Tõepoolest, minu pakutav arendus lisaks standardsetele näidiskvarts- (1) ja mõõteostsillaatoritele (2) on väline induktiivpool L (otsingukaadri andur), mikser (3) ja helisalvesti VA (telefonikapsel ), on uusi seadmeid, mis parandavad oluliselt jõudlusomadusi. See on integraator (4), mis toodab saehamba signaali amplituudiga, mis on võrdeline kontrolllöögi sagedusega, ja kirjutusimpulsi kujundaja (5), mis koos lüliti (6) ja allika järgijaga VT moodustavad analoogi. salvestusseade, mis salvestab integraatori tipppinge.
Metallidetektor ei saa hakkama ilma komparaatorita (7), mis tagab elektroonika automaatse ülekande maksimaalse tundlikkuse tsoonist üks-ühele löökide salvestamise piirkonda (ja vastupidi), ilma spetsiaalse VCO generaatorita (8), mis muundab allikajärgijas tekkiva pinge elektriliste võnkesagedusteks 200-8000 Hz. ja ka ilma ülalmainitud originaalse AFC sagedusjuhtimissüsteemita (9), millel on spetsiaalne seade, mis aeglustab seadme reageerimist liiga järsule juhtpinge muutusele - Siin on mitmeid teisi tehnilisi lahendusi, mille hulgast ei saa muidugi mainimata jätta “operatsioonivõimendit” ja spetsiaalset mikserit (10).
Nagu praktika näitab, võimaldab just selline seadmete koosseis valitud helisignaali genereerimise meetodiga kuulata mõlemat sagedust üheaegselt, hõlbustades oluliselt seadme esialgset seadistamist teatud tundlikkuse jaoks. Ja töökindlus on tagatud üsna kõrge. Isegi ekstreemses olukorras, kui näiteks otsingukaader-sensor läheneb massiivsele metallobjektile kaugusel, mille juures vahesagedus muutub peaaegu kriitiliseks (70 Hz), ei esine talitlushäireid - kõrvaklappidest kostab ainult muutuvat löögisagedust. .
Nüüd üksikasjadest, mis kajastuvad elektriskeemil. Mudeli generaator on valmistatud DD1.1 elemendil. Selle sagedust stabiliseerib kvartsresonaator ZQ1, mis on ühendatud positiivse tagasiside ahelaga. Generaatori ergastamiseks toite sisselülitamisel kasutatakse takistit R1. Siin asuv puhverelement DD1.2 laadib generaatori maha ja genereerib ka digitaalsete tasemetega signaali. Takisti R2 määrab koormuse astme ja kvartsresonaatori poolt hajutatud maksimaalse võimsuse.
Riis. 1. Metallidetektori plokkskeem.

Riis. 2. Pingete ja voolude diagrammid seadme juhtimispunktides.
See generaator võib töötada peaaegu kõigi resonaatoritega voolutarbimisel 500-800 µA. Ja sellele kahega järgnev sagedusjagaja (element DD2.1) genereerib sümmeetrilise meanderiga signaali, mis on vajalik mikseri normaalseks tööks.
Mõõtegeneraator on kokku pandud asümmeetrilise multivibraatori ahelaga (transistorid VT1 ja VT2). Iseergutusrežiimist väljumise tagab kondensaatori C7 positiivne tagasisideahel. Sageduse seadistuselemendid on C3 - C5, VD1 ja otsingupooli andur L1. Veelgi enam, genereerimine toimub vahemikus 500 kHz kuni 700 kHz, sõltuvalt olemasolevast kvartsresonaatorist.
Metallidetektori ahel

Selline oluline parameeter nagu lühiajaline ebastabiilsus on selle generaatori jaoks väike. Sageduse triiv esimese 10 sekundi jooksul vahetult pärast toite sisselülitamist ei ületa 0,7 Hz (ja iga 30 minuti järel - kuni 20 Hz), kuigi isegi 1 Hz 1 minuti jooksul (ilma AFCta) peetakse normaalseks tööks vastuvõetavaks. seade.
Mõõtegeneraatori tekitatud sinusoidne signaal, mille amplituud on 1–1,2 V, suunatakse eralduskondensaatori C9 kaudu päästikule DD3.2, mis genereerib ristkülikukujulisi impulsse digitaalse taseme ja töötsükliga 2. R5R6 on jagaja vajalik ahela selle osa normaalseks tööks. Noh, DD3.3 toimib puhvri kaskaadina. Sellest tulev signaal suunatakse mikserisse (T-trigger DD2.2). Sinna jõuab ka sagedus mudelgeneraatori jagajalt.
DD2.2 tööomadused on sellised, et kui selle loogikaelemendi sisenditesse C ja D saabuvad kaks tiheda sagedusega impulsside jada, siis väljunditesse genereeritakse rangelt sümmeetrilise meanderiga diferentsisagedussignaal. Veelgi enam, kõik segisti väljundist 12 eemaldatud on joonisel 2a näidatud kujuga.
Otsesed ja viivitusega (joonis 26) inverteeritud (tänu R8C11 vooluringile ja elemendile DD4.2) signaalid summeeritakse lülitile DD5.1, mis toimib loogilise JA/VÕI, moodustades lühikese positiivse. kirjutage impulsse (joonis 2c) analoogsalvestusseadmete (DD5.2, C13. VT3) tööks. Kuid see pole veel kõik. DD4.2 väljundist võetud signaal jõuab integraatorisse, mis on valmistatud klassikalise skeemi järgi, kasutades VD2, R10 - R11, DA1, C12. Takisti R11 piirab kondensaatori C12 laadimisvoolu, koormates maha elemendi DD4.2 väljundi.
Integreeritud signaal (joonis 2d) klahvi DD5.2 kaudu. mida juhitakse DD5.1 impulssidega, suunatakse salvestuskondensaatorisse C13, kus moodustub integraatorist tuleva tippväärtusega võrdne pinge ja seda hoitakse suure täpsusega kuni uue salvestustsüklini (joonis 2e). Kondensaator C14 silub "sammu" efekti, mis võib tekkida löögisageduste järsu muutumise korral (joonis 2e).
Lähtejärgijalt läheb signaal komparaatorisse DD4.3, VCO-sse (pinge juhitav generaator) ja AFC ahelasse. Jagaja R21R22 koos tagasisidega R23 ja R24 kitsendab juhtpinge vahemikku amplituudini 1,2 V. Operatsioonivõimendi DA2 võrdleb saadud jaguriga R26R29 seadistatuga ja genereerib varikapi juhtpinge. VD1.
Takistiga R26 saate määrata AFC püüdmise alguspunkti (tundlikkuse) umbkaudselt ja R27 - täpselt. Veelgi enam, kui liigutada liugurit R26 äärmise (diagrammi järgi ülemise või madalama) asendi poole, on lihtne lahkuda AFC püüdmistsoonist (±300 Hz), rakendades režiimi "üks-ühele" löögisagedusega. , mis muudab seadmega töötamise paindlikumaks.
Et mõista AFC reageerimist löögisageduse järsule muutusele aeglustava üksuse toimimise iseärasusi, oletame, et transistori VT4 põhjal on näiteks mingi püsiv U b. . Oletame ka, et ühel hetkel toimub järsk muutus löögisageduses ja vastavalt ka pinges C14-l. Meie metallidetektori tööahel reageerib sellisele "sisendile" kindlasti transistori VT4 U b piisava kõrvalekaldega eelmisest väärtusest (tänu suurtele reitingutele R19, R20 ja C16). Kuid reaktsioon löögisageduse sujuvale muutumisele on kindlasti reaktsioon nimetatud pingete aeglase muutumise kujul.
Kui metallese satub otsingukaadri-anduri tundlikkustsooni ja jääb sinna suhteliselt pikaks ajaks, tekib VT4 baasil pinge, millest tavaliselt piisab määratud sagedusrežiimi naasmiseks. Kuid kui andur liigutatakse järsult küljele, ei saa transistori VT4 olukord kiiresti naasta eelmisele tasemele. See tähendab, et luuakse tingimused üleminekuks läbi "0" (positiivse tagasiside tekkimine). Viimase välistamiseks šunditi R19 dioodiga VD3, mille kaudu mahtuvus C16 kiiresti tühjeneb (U b naaseb seatud tasemele).
Tegelikult on AFC-l (olenevalt sellest, mis suunas löögisagedus muutub) kaks ajakonstanti. Ja kuna anduri spetsiaalne disain välistab praktiliselt tuvastatud objektide ferromagnetiliste omaduste mõju otsingugeneraatori f suurenemisele, töötavad nii AFC kui ka seade tervikuna kõigis režiimides üsna õigesti. VCO (DD4.4 ja R18, C15) teisendab löögisagedusega muutuva pinge sageduseks. Ja jagaja R16R17 abil konfigureeritud komparaator DD4.3 võimaldab seda teha maksimaalse tundlikkuse tsoonis.
VCO sagedus antakse mikseri sisendisse A (lüliti DD5.4). CO-sisend tuleb loogilisest elemendist DD4.1 ja erinevusest f lööb ning lühikesest negatiivsest impulsist, mille moodustab diferentseerimisskeem C10R9 (kõrvaklappide paremaks heliks, energiatarbimise vähendamiseks). Selle tulemusena on mikseri väljundis kas moduleeritud VCO sagedus või ainult löögisagedus. Lisaks teostab vooluahel automaatselt ülemineku ühest režiimist teise. Muutuv takisti R30 toimib koormuse ja helitugevuse regulaatorina ning SA1 koos sellega toimib toitelülitina.
Kasutades CMOS-seeria kiipe, operatsioonivõimendid mikrovoolurežiimis töötamine võimaldas vähendada voolutarbimist 6 mA-ni, muutes Krona aku kasutamise toiteallikana vastuvõetavaks.
Sarnaselt teistele analoogidele (sealhulgas need, mis on avaldatud ajakirjades “Model Designer” nr 8"89 ja 4"96), on peaaegu kogu metallidetektor paigaldatud trükkplaat valmistatud ühepoolsest fooliumist klaaskiust. Otsingugeneraator on paigutatud tinast varjestuskarpi. Plaadi mõõtmed sisaldavad ainult reguleerimistakistusi R26, R27, R30, pistikupesasid toiteploki ja kõrvaklappide ühendamiseks ning anduri raami.
Seadme trükkplaat

DD1 K561LA8; DA1-DA2 KR140UD1208; DD2 K561TM2; VT1-VT3 KP303A;
DD3 K176LP4; VT4 KT3102G; VD1 D902; VD2-VD3 KD522
PCB topoloogia
Anduri raami tehnoloogia ja hoolikas valmistamine on kogu metallidetektori toimimiseks nii olulised, et nõuavad ilmselt üksikasjalikumat esitlust. Siin kasutatakse kimpu, mis koosneb üheteistkümnest PEV2-1.2 traadi 1100 mm lõigust. Mähkides selle tihedalt elektrilindi kihi sisse, surutakse see alumiiniumtoruks, mille siseläbimõõt on 10 mm ja pikkus 960 mm. Saadud toorik vormitakse ümarate nurkadega ristkülikukujuliseks raamiks 300x200 mm.
Esimese juhtme ots, mis on asetatud alumiiniumist korpusesse - elektrostaatilisesse ekraani, joodetakse järjestikku teise alguseni ja nii edasi, kuni moodustub omamoodi 11-pöördeline induktiivpool. Adhesioonid isoleeritakse üksteisest paberteibiga ja täidetakse epoksiidvaik, välja arvatud lühise pöörde ilmnemine toru enda raamiks painutamise tõttu.
Metallidetektori raam

Siin on soovitav varustada mis tahes kinnine kõrgsageduspistik ja sobiv (mittemetallist) kinnitus ridva käepidemele, mida saab kasutada kokkupandavast õnge ühe või kahe sektsioonina. Raami ühendamiseks seadmega on parem kasutada koaksiaaltelevisiooni kaablit, näiteks RK75.
Otsingugeneraatori drossel L2 (tähistus siin ja allpool - vastavalt joonisele 1 ja vastavalt põhimõttele elektriskeem ajakirja eelmises numbris avaldatud metallidetektoril) on 450 keerdu PEL1-0,01 traati. Mähis - kuhjatud raamile läbimõõduga 4 ja pikkusega 15 mm koos ferromagnetiline südamik M600NN (saate kasutada sobivat silmuspooli vanast raadiost). Sellise õhuklapi induktiivsus on 1-1,2 mH.
Seade kasutab kondensaatoreid KSO või KTK (C3, C4, C5), KLS või KM (C1, C2, C6 - C13, C15), K50-6 või K53-1 (C14, C16, C17). Valikus on ka takistid. Eelkõige sobivad SP5-2 või SP-3 "tuuneritele" R26, R27. Sama võib öelda muutuja R30 kohta, ainult et see tuleb kombineerida lülitiga.
Kõik ülejäänud takistid on MLT-0,125 (VS-0,125).
Digitaalset MS-i saab asendada end hästi tõestanud K176 seeria analoogidega. DD1, DD3 - kõik samast seeriast, kui need sisaldavad vajalikku arvu invertereid.
Transistore saab ka välja vahetada. Näiteks KP303B (-Zh) sobib VT1 ja VT2 jaoks. VT3 asemel on vastuvõetav KP303 või KP305 (nime lõpus olev täheindeks sel juhul rolli ei mängi) ja KT3102G (VT4) asendab KT3102E.
Kvarts on üks neist, mis on mõeldud 1,0-1,4 MHz jaoks. Kõrvaklappide valik on samuti piiramatu. Nagu praktika näitab, on TON-1 või TON-2 üsna sobivad. Varicap D901 saab asendada D902-ga. Dioodid VD2 ja VD3 KD522 (KD523) mis tahes täheindeksiga.
Kokkupandud seadme seadistamiseks läheb vaja ostsilloskoopi ja... täpsust töös. Pärast kogu paigalduse hoolikat kontrollimist antakse vooluahelale toide. Seejärel kontrollige voolutarbimist, mis korralikult teostatud tööprojekti jaoks peaks olema 5,5–6,5 mA. Kui määratud väärtusi ületatakse, otsitakse ja kõrvaldatakse vead jootmisel jms.
Mudelgeneraatori toimimist kontrollib DD2 mikroskeemi 1. kontakti olemasolu, mille sagedus on võrdne 0,5 f kvartsresonaatori töötsükliga 2. Seejärel liiguvad nad edasi "otsingumootori" juurde. Pool toitepingest antakse trükkplaadil asuvasse katsepunkti, kus R3 ja C8 kokku saavad, lahutades samal ajal DA2 kiibi väljundi. Ja transistori VT2 äravooluga ühendatud ostsilloskoobiga kontrollitakse väljundpinge amplituudi. See peaks olema 1 V kuni 1,2 V. Kui hälve ületab 0,1 V, reguleerige induktiivpooli L2 pöörete arvu.
Ja kondensaatorite C3 ja C4 abil seatakse optimaalne signaali sagedus, mis on võrdne 0,5f kvartsiga. Lisaks peaks andur ise asuma metallesemetest mitte lähemal kui kaks meetrit. Vajadusel, valides R5, püüavad nad saada sümmeetrilist väljundsignaali DD3 mikroskeemi 9. kontakti juures (sel juhul peab mikser tootma sageduse erinevuse signaali, mille meander on 2). Seejärel, muutes varikapi pinget, on löögisagedus 8-9 Hz, mõõtke signaal DA1 integraatori viigu 6 juures - see peaks olema "altpoolt piiramise äärel". Vastav reguleerimine toimub takisti R10 väärtuse valimisega.
Ühendades ostsilloskoobi transistori VT3 allikaga, kontrollige pingetaseme muutust sõltuvalt löögisagedusest. Takistid R16 ja R17 tagavad, et komparaatori väljundis (DD4 kiibi kontakt 10) ilmub loogiline null ainult siis, kui f löögid on üle 70 Hz.
VCO reguleeritakse takisti R15 abil nii, et generaator hakkab tööle, kui integraatori signaal "lahkub altpoolt piirist". Tulevikus lihtsustab see oluliselt seadme reguleerimist enne töötamist, kuna VCO minimaalne sagedus vastab metallidetektori maksimaalse tundlikkuse seadistusele.
Olles taastanud eelnevalt spetsiaalselt suletud ühenduse R3 ja C8 vahel DA2-ga trükkplaadil, jätkake viimane etapp seadme silumine. "Tuuner" mootor R26 keeratakse äärmuslikku ("pluss") asendisse, mis vastab maksimaalsele löögisagedusele (ja otsingugeneraatori f > f standardse korral).
Seejärel, pöörates liugurit aeglaselt vastupidises suunas, hakkavad nad jälgima signaali DA1 kontakti 6 juures. Pange tähele, kuidas (R26 mootori teatud asendis) ilmub ostsilloskoobi ekraanile hetk, mil signaal siseneb AFC püüdmistsooni.
Jätkates häälestustakisti R27 nupu keeramist, saavutame löögisageduse 10 Hz, kontrollides samal ajal automaatse sagedusmuunduri tööd (signaali kalduvuse järgi naasta algsesse olekusse).
Takistite R26, R27 mootoreid tuleb liigutada aeglaselt, võttes arvesse AFC suurt inertsi. Sel juhul kostub kõrvaklappidesse VCO minimaalne sagedus ja nõrgad f-löögiga klõpsud. Mõnel juhul võib esineda heli "ujumise" mõju mõne fikseeritud oleku suhtes. Sel juhul on vaja täpsemalt valida takistite R23, R24 suhe või vähendada R19, R20 väärtusi.
Nagu juba märgitud, saab metallidetektori elektroonilise osa (ja see on peaaegu kogu seade) paigaldada mis tahes sobivasse käepidemele kinnitatud korpusesse. On vaja tagada, et otsinguraam-andur ja ka ühendusjuhtmed oleksid üksteise suhtes kindlalt fikseeritud. Lõppude lõpuks võivad isegi nende osade väikesed vibratsioonid, mis tekivad operaatori liikumisel, tekitada valesignaali (eriti vooluringi maksimaalse tundlikkuse ja seadme ebapiisava kogemuse korral). Samal põhjusel tuleks spaatlit kanda selja taga, bajonett üleval (anduri raamist eemal). Ja operaatori kingapaelte metallotsad on üldiselt vastuvõetamatud. Nende tekitatud interferents ähvardab nullida kõik ülitundliku seadme pingutused leida maa seest üles see, millest see nii vastumeelselt lahku läheb.
Metallidetektoriga töötamine ei erine palju kaasaegse käsimiinidetektoriga töötamisest. Muidugi vajavad sellised täpsed instrumendid kohendamist. Meie konkreetsel juhul on selleks häälestustakisti R26 liuguri pööramine äärmuslikku ("positiivne") asendisse ja R27 keskele. Pärast seadme vooluvarustust keerake reguleerimisnuppu R26 vastassuunas, kuni kõrvaklappidesse ilmub VCO signaal. Pärast seda seab takisti R27 reguleerimine vajaliku tundlikkuse. Ja R26 abil seatakse f löögid suvaliselt (seadmega töötamisel löögirežiimis "üks ühele") vahemikus 200-300 Hz.
AFC ja VCO on sisuliselt keelatud, seega otsitakse nagu tavaliselt. Väikeste objektide asukoha selgemaks määramiseks tuuakse anduriraam otsingualale kas horisontaalselt (ümardatud nurgaga ettepoole) või uuritava pinna suhtes 45-90° nurga all (selge asendieelisega üks raami külgedelt).
Y. STAFIYCHUK, Moldova Vabariik
Impulssmetallidetektorite omadused ja tööpõhimõte
Värskendatud 07.10.2018impulss metallidetektor ( Impulss metallidetektor või - inglise) kõige tundlikum kõigi detektorite seas, reageerib mis tahes metallidele, ei erista ferromagneteid diamagnetitest. Otsingufunktsioonid võimaldavad detektoril tuvastada kulda ja kullatükke leeliselistes tingimustes ja äärmuslikel maapinna (või kivimite) temperatuuridel, mis on VLF/TR-seadmete jaoks liiga keerulised. Samuti suudab see tuvastada kivimites ja savis leiduvaid metallimaake.
Pulssmetallidetektorid on asendamatud rannikuvööndis, vee all ja kõrge mineralisatsiooniga pinnases otsimisel. Seadmete töö ei sõltu maa ja vee mõjust. Nad töötavad võrdselt hästi nii vee all kui ka maal. Sellepärast PI tehnoloogia kasutatakse veealustes metallidetektorites. Seadmed annavad häid tulemusi otsides liivastes ja märgades randades. Maapinnas ja soolases vees olevate objektide tuvastamise sügavus on suurem võrreldes VLF metallidetektoritega.
Impulssmetallidetektorid toimivad paremini kui VLF metallidetektorid elektriliinide läheduses, samuti mobiilsidesüsteemide saateantennid. Seda tüüpi metallidetektori teenindamine on üsna lihtne. Reeglina on need varustatud ühe tundlikkuse regulaatoriga, kuigi arenenumatel mudelitel võib olla ka teisi juhtnuppe.
Seadmed tarbivad palju energiat ja vajavad töötamiseks võimsaid patareisid. Tavalised akud ei kesta kauem kui 12 tundi pidevat tööd. Leelispatareide kasutamisel pikeneb tööaeg.
Tehnoloogia Impulsi induktsioon ei ole universaalne ja impulssmetallidetektorite puudused piiravad nende võimalusi. Praegu on parimad metallidetektorid igaks otstarbeks VLF-tehnoloogiat kasutavad seadmed (väga madalad sagedused). Siiski võidakse PI-tehnoloogiat edasi arendada ja tulevikus välja töötada uusi uute võimalustega detektoreid.
Impulssmetallidetektorite disain ja tööpõhimõte
Impulss metallidetektorid on lihtne disain. Seade koosneb impulsigeneraatorist, otsingupoolist, signaali võimendusseadmest, analüsaatorist ja kuvaseadmest. Rulli disain on samuti lihtne. See edastab ja võtab vastu samal ajal. See vähendab oluliselt seadme kaalu.Otsimismähis mõjub maapinnale pulseeriva elektromagnetväljaga. Impulsse väljastatakse sagedusega 50...400 Hz ja energiaga umbes 100 W. Magnetinduktsiooni tõttu tekivad välja piirkonnas asuva metalleseme pinnale pöörisvoolud.
Need voolud on sekundaarse signaali allikaks (peegeldunud impulss, vastus). Impulsside vahelistes intervallides saab vastuvõtja vastuse, mida analüsaator võimendab ja töötleb ning seejärel kuvarile väljastatakse.
Peegeldunud impulsi vaibumisaeg on pikem kui emiteeritud impulsi vaibumisaeg (iseinduktsiooni nähtuse tõttu). Ajavahe on analüüsi ja salvestamise parameeter. Pinnase või vee pöörisvoolude nõrgenemine toimub palju kiiremini ja seade ei tuvasta seda. Sellepärast impulssmetallidetektorid töötavad tõhusalt vee all, mineraliseerunud, soolastel ja märgadel muldadel.
Seotud sildid: impulssmetallidetektorid, impulssmetallidetektorid, PI-tehnoloogia, impulss-induktsioon, impulssmetallidetektorite tööpõhimõte, impulssmetallidetektorite seade, kuidas töötab impulss-metallidetektor
Saatja
Saateosa koosneb ristkülikukujulisest impulssgeneraatorist mikroskeemil IC1 - NE555 (KR1006VI1 kodumaine analoog) ja võimsast lülitist transistoril T1 - IRF740 (IRF840). Selle sisselülitamiseks on T2 transistor - 2N3904. Koormus T1 on otsingupool L1. Impulsi kestuse ja sageduse reguleerimiseks valige vastavalt takistused R10 ja R11.
Vastuvõtja
Vastuvõtuseade on kokku pandud IC2 kiibile - TL074. See koosneb neljast madala müratasemega operatsioonivõimendist. Võimendi esimese astme sisendis on signaali piiraja, mis kasutab dioode VD1, VD2, mis on omavahel ühendatud. Viimase võimendi väljundis lülitub sisse LED, mis süttib, kui pooli väljas on metall.
Pärast esimest võimendusastet on passiivne filter, mis lõikab sissetulevast impulsist kasuliku osa.
IC3 - NE555 kiip sisaldab heligeneraatorit, mis käivitub koos LED-iga, kui metall ilmub. Generaatorit juhib transistor T3 - 2N3906.
Dioodi VD3 IN4001 koos kaitsmega (0,5A) on vaja vooluahela kaitsmiseks voolu vastupidise polaarsuse eest.
Otsingupool
Mähis L1 (250μH) on keritud 180–200 mm tornile ja sisaldab 27 keerdu PELSHO traati laki- ja siidiisolatsioonis, kui seda pole, siis PEV (PEL, PETV jne), läbimõõduga 0,3 - 0,8 mm. Juhtme võib võtta trafodest, drosselidest, kõrvalekaldesüsteemidest või kasutuskõlbmatu värviteleri demagnetiseerimisahelast. Mähise saab kerida ümarale tornile, näiteks ämbrile või pannile. Seejärel eemaldage see tornist ja mähkige mitu kihti elektrilinti. Pooli tegemiseks võid kasutada plastikust ämbri kaant või tikkimisrõngast, mis hoiab traati väga hästi kinni.
Rulli raam EI TOHI sisaldada metalli! Seda tüüpi metallidetektori mähis ise EI ole samuti fooliumisse mähitud!
Pooli ja plaati ühendav traat peab olema paks ja eelistatavalt varjestatud ning sellel ei tohi olla ühendusi ega pistikuid. Impulsi korral jõuab vool suurte väärtusteni ja kõik ülaltoodu mõjutab seadme tundlikkust.
Metallidetektori seadistamine
Selle metallidetektori seadistamine on palju keerulisem kui varem ühe K561LA7 kiibi puhul käsitletu.
Jootke plaat puhta kampoli või piiritus-kampoli lahusega. Pärast jootmist loputage allesjäänud kampol alkoholiga hambaharjaga maha. Pärast paigaldamist kontrollige ALATI uuesti õiget paigaldust vastavalt vooluringiskeemile.
Korralikult kokkupandud metallidetektor töötab kohe, kuid maksimaalse tundlikkuse saavutamiseks kulub palju vaeva ja kannatust ning selle seadistamisel tuleks kasuks ka ostsilloskoop ja sagedusloendur. Teil on vaja ka multimeetrit. Sisselülitamisel kontrollige seadme tarbitud voolu. Kell 9 V - 30 mA, 12 V - 42 mA juures.
Seadme toiteks on parem võtta patareisid. Võtsin selle vanast sülearvuti akust. 4 tk 3V = 12V.
Kõigepealt on soovitatav kerida pooli umbes 30 pööret, seejärel reguleerida takistitega maksimaalset tundlikkust. Kõrvaklappides peate saavutama R6 ja R16 HARULDAMINE LÕGENEMINE. Seejärel keerake 2 pööret - seejärel reguleerige, kuni see praksub. Näiteks kerisin 2 pööret ja proovisin reguleerida esimese astme võimendust (R6), seejärel reguleerida filtrit (R14, C8), seejärel reguleerida teise astme (R20) ja kolmanda (R22) võimendust.
Kuigi saate seda heli abil juhtida, ärge pöörake LED-tulele tähelepanu. Pöörete kerimisel vool suureneb, kuid tundlikkus tuleb maksimaalselt “püüda”. Kui pöördeid on palju, jääb see nõrgaks ja väikeste pööretega ka nõrgaks. Peate leidma "kuldse keskmise".
Takistid R6 - esimese etapi võimenduslävi(pingetabel allpool) koos regulaatoritega "Filter" Ja "Kasu" saavutada maksimaalne tundlikkus ( Kõrvaklappidest kostab harvaesinev krõbin! ) Ja R24 - heligeneraatori lävi, et LED-tuli ja ostsillaatori toon kõrvaklappides ilmuksid samaaegselt. Regulaatorid "Filter" Ja "Kasu" määrake LED-i helendama hakkamise lävi.
Multimeetri abil saate mõõta op-amp klemmide pinget (V) (ilma metalli olemasoluta mähise väljas / metalli olemasoluga) (metallidetektori toiteallikas + 12V):
IC1 (NE555)
IC2 (TL074)
- 0 / 4,1
- 0,8 / 4,3
- 0,8 / 4,3
- 0,1 / 4,3
- 4 / 3,6
- 4,0 / 3,6
IC3 (NE555)
- 7,1 / 6,3
- 11,5 / 10,1
- 7,1 / 6,3
- 7,1 / 6,3
Kui teil on ostsilloskoop, saate vaadata:
Saatja töö
- generaatori sagedus IC1 kontaktil 3 (reguleerimine R11 - 120 - 150Hz);
- juhtimpulsi kestus väraval T1 (reguleerimine R10 - 130-150 μs).
Vastuvõtja töö
Saatja impulsside läbimine vastuvõtja juhtimispunktides (operatsioonivõimendite väljundid 1, 14, 8 ja 7.
Heligeneraatori mikroskeemi väljundis (kontakt 3) ilmub toon sagedusega umbes 800–1000 Hz. Tooni sageduse määravad kondensaator C13 ja takistus R27.
Helitugevuse suurendamiseks mikrolülituse väljundis on T4 transistor - 2N3906. Kõrvaklappide helitugevust reguleerib takistus R31, mis on kõrvaklappidega järjestikku ühendatud.
Metallidetektori Vintik trükkplaat

Metallidetektori ahel on kokku pandud fooliumist klaaskiust trükkplaadile vastavalt ülaltoodud joonisele.
Osade asukoht tahvlil

Töö metallidetektoriga
Kui see on sisse lülitatud, kasutage regulaatoreid R14 “Filter” ja R16 “Gain”, et seada LED-i helendama hakkamise lävi. Maksimaalse tundlikkuse seadistus: leiame asendi, kus klõpsud on kõlarist vaevu kuuldavad!


Modifitseeritud impulssmetallidetektori "VINTIK-PI" skemaatiline diagramm


Skeem erineb eelmisest:
- Lisades NE555 kiibile filtri ja sisselüliti asemel viivitussõlme väljatransistor BF245. Impulsi kestust reguleerib trimmitakisti vahemikus 50 kuni 100 μs. Eelmises versioonis vajalik osa Impulsi lõikas välja passiivfilter mudelitel R9, R12, R14, C8, C9, C10, nüüd teeb seda võtmega viivitusseade (NE555 ja BF245). Selle lahendusega lihtsustub metallidetektori filtri seadistamise ülesanne ning ka tundlikkus tõuseb 5-7 cm, voolutarve on tõusnud 65 mA-ni (olenevalt mähist).
- Lisatud võimsuse juhtimisahel vabale elemendile (IC 2.2) TL074. Kui võimsus langeb alla 12 V, süttib LED. 12 V kuni 10 V ahel on endiselt töökorras "võimenduse" regulaatori vähese reguleerimisega. Tundlikkus väheneb ka toitumise vähenemisega.
- Helitugevuse reguleerimise skeemi on muudetud. Nüüd saate väljundiga ühendada nii kõrvaklapid kui ka vähese energiatarbega kõlari. Kõrvaklappide ühendamisel vaigistatakse kõlar.
- See vooluahel kasutab "korvi tüüpi" otsingumähist, mis koosneb "keerdpaar" arvutikaabli kolmest pöördest (ilma ekraanita). Selle abiga on võimalik saavutada seadme suurem tundlikkus.
Kavandatud metallidetektorite üle saate arutada aadressil.
Kui soovite vooluringi kokku panna, kuid teil pole vajalikke osi, saate seda teha